Experiments#
Experiments are a set of tasks that are executed in a specific order. Experiments are represented as directed acyclic graphs (DAGs) where nodes are tasks and edges are dependencies between tasks. Tasks part of an experiment can pass parameters, devices, and resources to each other using EOS’ reference system. Task parameters may be fully defined, with values provided for all task parameters or they may be left undefined by denoting them as dynamic parameters. Experiments with dynamic parameters can be used to run campaigns of experiments, where an optimizer generates the values for the dynamic parameters across repeated experiments to optimize some objectives.
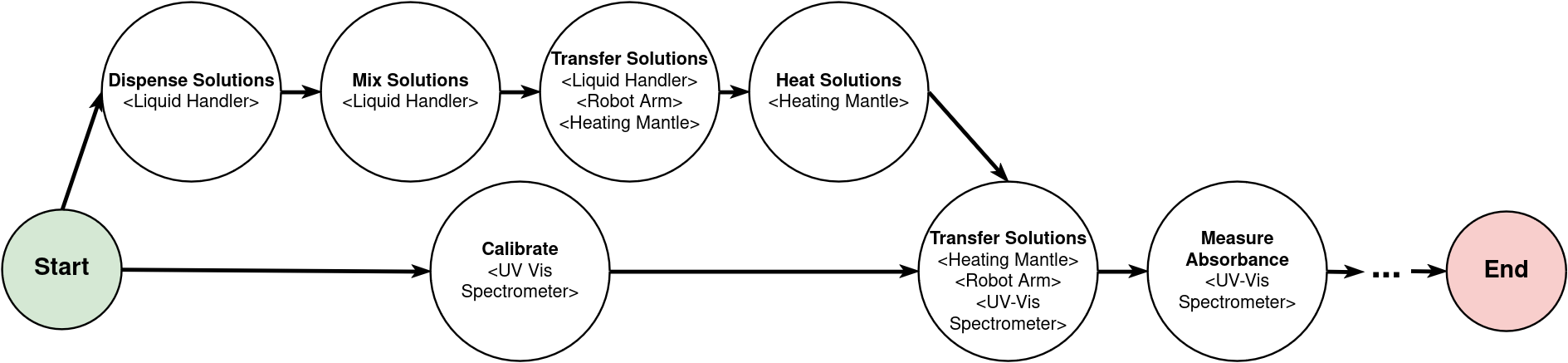
Above is an example of a possible experiment that could be implemented with EOS. There is a series of tasks, each requiring one or more devices. In addition to the task precedence dependencies with edges shown in the graph, there can also be dependencies in the form of parameters, devices, and resources passed between tasks. For example, the task “Mix Solutions” may take as input parameters the volumes of the solutions to mix, and these values may be output from the “Dispense Solutions” task. Tasks can reference input/output parameters, devices, and resources from other tasks.
Experiment Implementation#
Experiments are implemented in the experiments subdirectory inside an EOS package
Each experiment has its own subfolder (e.g., experiments/optimize_yield)
There are two key files per experiment:
experiment.ymlandoptimizer.py(for running campaigns with optimization)
YAML File (experiment.yml)#
Defines the experiment. Specifies the experiment type, labs, and tasks
Below is an example experiment YAML file for an experiment to optimize parameters to synthesize a specific color:
experiment.yml
type: color_mixing
desc: Experiment to find optimal parameters to synthesize a desired color
labs:
- color_lab
tasks:
- name: retrieve_container
devices:
robot_arm:
lab_name: color_lab
name: robot_arm
color_mixer:
allocation_type: dynamic
device_type: color_mixer
allowed_labs: [color_lab]
resources:
beaker:
allocation_type: dynamic
resource_type: beaker
dependencies: []
- name: mix_colors
devices:
color_mixer: retrieve_container.color_mixer
resources:
beaker: retrieve_container.beaker
parameters:
cyan_volume: eos_dynamic
cyan_strength: eos_dynamic
magenta_volume: eos_dynamic
magenta_strength: eos_dynamic
yellow_volume: eos_dynamic
yellow_strength: eos_dynamic
black_volume: eos_dynamic
black_strength: eos_dynamic
mixing_time: eos_dynamic
mixing_speed: eos_dynamic
dependencies: [retrieve_container]
- name: move_container_to_analyzer
devices:
robot_arm:
lab_name: color_lab
name: robot_arm
color_mixer: mix_colors.color_mixer
color_analyzer:
allocation_type: dynamic
device_type: color_analyzer
allowed_labs: [color_lab]
resources:
beaker: mix_colors.beaker
dependencies: [mix_colors]
- name: analyze_color
devices:
color_analyzer: move_container_to_analyzer.color_analyzer
resources:
beaker: move_container_to_analyzer.beaker
dependencies: [move_container_to_analyzer]
- name: score_color
parameters:
red: analyze_color.red
green: analyze_color.green
blue: analyze_color.blue
total_color_volume: mix_colors.total_color_volume
max_total_color_volume: 300.0
target_color: eos_dynamic
dependencies: [analyze_color]
- name: empty_container
devices:
robot_arm:
lab_name: color_lab
name: robot_arm
cleaning_station:
allocation_type: dynamic
device_type: cleaning_station
allowed_labs: [color_lab]
resources:
beaker: analyze_color.beaker
parameters:
emptying_location: emptying_location
dependencies: [analyze_color]
- name: clean_container
devices:
cleaning_station: empty_container.cleaning_station
resources:
beaker: empty_container.beaker
parameters:
duration: 2
dependencies: [empty_container]
- name: store_container
devices:
robot_arm:
lab_name: color_lab
name: robot_arm
resources:
beaker: clean_container.beaker
parameters:
storage_location: container_storage
dependencies: [clean_container]
Let’s dissect this file:
type: color_mixing
desc: Experiment to find optimal parameters to synthesize a desired color
labs:
- color_lab
Every experiment has a type. The type is used to identify the class of experiment. When an experiment is running then there are instances of the experiment with different IDs. Each experiment also requires one or more labs.
Now let’s look at the first task in the experiment:
- name: retrieve_container
devices:
robot_arm:
lab_name: color_lab
name: robot_arm
color_mixer:
allocation_type: dynamic
device_type: color_mixer
allowed_labs: [color_lab]
resources:
beaker:
allocation_type: dynamic
resource_type: beaker
dependencies: []
The first task is named retrieve_container.
This task demonstrates several key concepts:
Named Devices: Devices are specified as a dictionary where each key is a named reference (e.g., robot_arm, color_mixer).
These names are used by the task implementation to access the device.
Specific Device Allocation: The robot_arm device is explicitly assigned:
robot_arm:
lab_name: color_lab
name: robot_arm
This tells EOS to use the specific robot arm device from the color_lab.
Dynamic Device Allocation: The color_mixer uses dynamic allocation:
color_mixer:
allocation_type: dynamic
device_type: color_mixer
allowed_labs: [color_lab]
The scheduler will automatically select an available color_mixer device from color_lab when this task is ready to execute.
Dynamic Resource Allocation: The beaker resource is dynamically allocated from available beakers of type beaker.
Let’s look at the next task:
- name: mix_colors
devices:
color_mixer: retrieve_container.color_mixer
resources:
beaker: retrieve_container.beaker
parameters:
cyan_volume: eos_dynamic
cyan_strength: eos_dynamic
magenta_volume: eos_dynamic
magenta_strength: eos_dynamic
yellow_volume: eos_dynamic
yellow_strength: eos_dynamic
black_volume: eos_dynamic
black_strength: eos_dynamic
mixing_time: eos_dynamic
mixing_speed: eos_dynamic
dependencies: [retrieve_container]
This task demonstrates device and resource references:
Device Reference: color_mixer: retrieve_container.color_mixer tells EOS that this task must use the same color_mixer device
that was allocated to the retrieve_container task. This ensures that the beaker stays at the same mixer where it was placed.
Resource Reference: beaker: retrieve_container.beaker passes the beaker resource from the previous task to this one.
Dynamic Parameters: The mixing parameters are set to eos_dynamic, which is a special keyword in EOS for defining dynamic parameters.
These must be specified either by the user or an optimizer before an experiment can be executed.
The analyze_color task shows another device reference:
- name: analyze_color
devices:
color_analyzer: move_container_to_analyzer.color_analyzer
resources:
beaker: move_container_to_analyzer.beaker
dependencies: [move_container_to_analyzer]
Here, color_analyzer references the dynamically allocated analyzer from the move_container_to_analyzer task,
ensuring the analysis happens at the same analyzer where the beaker was moved.
Optimizer File (optimizer.py)#
Contains a function that returns the constructor arguments for and the optimizer class type for an optimizer.
As an example, below is the optimizer file for the color mixing experiment:
optimizer.py
from bofire.data_models.acquisition_functions.acquisition_function import qUCB
from bofire.data_models.enum import SamplingMethodEnum
from bofire.data_models.features.continuous import ContinuousOutput, ContinuousInput
from bofire.data_models.objectives.identity import MinimizeObjective
from eos.optimization.sequential_bayesian_optimizer import BayesianSequentialOptimizer
from eos.optimization.abstract_sequential_optimizer import AbstractSequentialOptimizer
def eos_create_campaign_optimizer() -> tuple[dict, type[AbstractSequentialOptimizer]]:
constructor_args = {
"inputs": [
ContinuousInput(key="mix_colors.cyan_volume", bounds=(0, 25)),
ContinuousInput(key="mix_colors.cyan_strength", bounds=(2, 100)),
ContinuousInput(key="mix_colors.magenta_volume", bounds=(0, 25)),
ContinuousInput(key="mix_colors.magenta_strength", bounds=(2, 100)),
ContinuousInput(key="mix_colors.yellow_volume", bounds=(0, 25)),
ContinuousInput(key="mix_colors.yellow_strength", bounds=(2, 100)),
ContinuousInput(key="mix_colors.black_volume", bounds=(0, 25)),
ContinuousInput(key="mix_colors.black_strength", bounds=(2, 100)),
ContinuousInput(key="mix_colors.mixing_time", bounds=(1, 45)),
ContinuousInput(key="mix_colors.mixing_speed", bounds=(100, 200)),
],
"outputs": [
ContinuousOutput(key="score_color.loss", objective=MinimizeObjective(w=1.0)),
],
"constraints": [],
"acquisition_function": qUCB(beta=1),
"num_initial_samples": 50,
"initial_sampling_method": SamplingMethodEnum.SOBOL,
}
return constructor_args, BayesianSequentialOptimizer
The optimizer.py file is optional and only required for running experiment campaigns with optimization managed by EOS.